
요즘 대세? 하모닉 드라이브가 모든 문제를 해결해주지는 않지만 분명히 지금 갖고 있는 적도의보다는 좋을 거라 기대하면서.
이 글은 적도의 완성할 때까지 계속 업데이트 예정!
2018.05.05
이쪽 지식이 워낙 없다보니 몇 번의 실수 덕분에 핵심 부품에 대한 계획을 세웠다.
적당한 스펙 찾는 데 인터넷 헤맨 시간, 계산에 들인 시간이 참 길었다.
매몰 비용이 벌써 발생하기 시작했다.
하모닉 드라이브 기어를 샀는데 회전축 샤프트가 달려 있다. 분해할 수 있으리라 생각했는데.... 샤프트를 잡고 있는 나사를 풀려고 하는데 플렉서블 스파인 기어가 "끄르르륵!!!" 틀어졌다. 이것은 완전히 분해해야만 고칠 수 있다. 망가졌다. 설사 잘 분해한다고 하더라도 추가적인 작업을 할 일이 엄청 번거롭다. 요놈은 포기. 300불 슝.
스테핑 모터는 또.... 오리엔탈모터 회사의 감속모터를 샀는데 감속비 36:1은 아무래도 큰 것 같다. 토크에 비해 사이즈도 크다. 사이즈 작은 것을 사자니 모터 연결부 지름이 안맞는다. 여기서 200불.
감속비를 낮추어 5:1 짜리 다시 구입. 그런데... 아무리 봐도 너무 크고, 결정적으로 출력부가 동축이 아니라서 설계가 예쁘게 안나온다. 후회 속에 또 150불.
최종 확정은 이걸로.

CSF series specification


토크와 관련한 용어 정의

토크에 관한 사양 조건
- 하모닉 드라이브사이즈 17, 감속비 100:1 하모닉 드라이브는 평균 토크의 한계값(Limit for Average Torque)이 39Nm로, 중심축에서 1m 떨어진 위치에 4kg을 운용할 수 있다. 8인치 반사 망원경을 생각하고 무게 중심이 중심축에서 25cm 올라온다면 16kg을 운용할 수 있다. (사진 촬영의 경우에는 훨씬 보수적으로 운영해야 한다. 균형추도 사용해야 한다. 2021.11.05)
- 망원경, 비축가이더와 CCD 카메라, 가벼운 파인더(극축정렬겸용)를 함께 올릴 수 있다.
- 14 사이즈 기어 유닛은 가볍고 작아서 좋지만 토크가 작아 탑재중량이 작아진다.
- 20, 25, 32와 같이 큰 사이즈는 무게, 부피, 가격이 부담된다.
- 결론 : CSF-17-100-2UH (17사이즈, 감속비 100:1, 플랜지와 베어링을 포함한 유닛)
- 감속 스테핑 모터
중간 감속모터는 중국산 유성기어 스테퍼 모터를 선택했다. 감속비는 10:1.
최종 하모닉 기어의 감속비가 100:1니까 하모닉 기어의 입력부(중간 감속모터의 출력부) 토크는 0.39Nm이면 된다. 동력 전달율이 80%를 고려하면 0.4875Nm면 된다. 중간 감속 모터의 홀딩 토크가 3.0Nm라고 한다. 충분하겠지? 스테핑 모터가 저속 운전할 때의 최대 토크는 홀딩 토크의 약 70~80% 정도인 것 같다.(아래 그래프)
 ///2018.10.19 추가
///2018.10.19 추가
스테퍼 모터의 토크-속도 특성 뿐만 아니라 마이크로 스테핑에 의한 토크 저하를 고려해야 한다. 16마이크로 스테핑을 하는 경우 최대 토크의 10%가 채 안된다.
만약 모터의 출력 토크가 0.5Nm로 요구되는데 16마이크로스테핑을 한다면 모터의 최대 토크가 5Nm로 요구된다.(마이크로 스테핑에서 증분 토크의 개념에 대한 오해에서 비롯된 내용이므로 삭제함. 스텝을 1개 건너가기 위해 필요한 토크를 증분 토크라고 하는데 마이크로 스테핑을 하면 당연히 1개의 스텝을 진행하는 데 필요한 토크(증분 토크)는 감소한다. 마이크로 스테핑은 해상도를 높이지만 정확도에서는 손해를 볼 가능성이 있는데, 그 이유는 증분 토크가 작아 실제로 샤프트의 회전이 나타나지 않는 경우가 발생할 수 있기 때문이다. 마이크로 스테핑을 한다고 해서 증분 토크 그래프처럼 그렇게까지 토크가 저하되는 것은 아니다. 2021.11.05 추가 수정)
고속에서의 토그 저하가 심하다면 하이토크 모터로 바꾸거나 공급 전압을 높여야 한다.
스테퍼 모터에 공급할 수 있는 최대 전압은 인덕턴스(mH 값)의 제곱근의 32배이다. 이번에 구입한 모터의 인덕턴스가 4.1mH이므로 최대 공급 전압은 64.8V이다.
물론 이 값이 실용적이지는 않다. 만약 이런 상태로 1.2A를 걸면 78와트를 쓰기 때문에 발열이 많고 드라이버에도 무리가 간다.
///
감속비 계산
하모닉 드라이브에서 100:1, 감속모터에서 10:1. 적경 적위축 모두 동일한 사양으로 최종 감속비는 1000:1이다.
=== 항성 추적시의 속도를 계산해 본다.
* 항성시 각속도 = 하모닉 기어 출력 각속도 = 15"/s
* 중간 감속 모터 출력 속도(x100) = 1500"/s = 25'/s
* 스테퍼 모터의 속도(x10) = 15000"/s = 4.167°/s
스테퍼 모터의 회전 주기 = 360°/(4.167°/s) = 86.16s
스테퍼 모터의 초당 스텝수 = 200/86.16=2.32step/s
* AstroEQ를 쓸 경우 저속에서 32 마이크로스텝을 적용한다면,
스테퍼 모터의 초당 펄스수 = 32*2.32 = 74pps
이 정도면 부드럽게 돌아갈 것 같다.
=== 고속 탐색 400배를 생각해본다.
AstroEQ 제어기는 고속 탐색에서 4 마이크로스텝을 사용한다고 한다.
* 스테퍼 모터의 분당 회전수 = 400*(4.167°/s)*(60s/min)/360° = 277.7rpm (적정 범위)
스테퍼 모터의 초당 펄스수 = 400*2.32*4 = 3712pps (적정 범위)
이 모터는 스펙이 자세하지 않다. 회전수-토크 그래프가 없다. 그러나 일반적인 스테핑 모터의 사양을 보니 24V 구동시 300rpm까지는 토크 저하가 없다. 12V 구동시 150rpm을 넘어서면 토크가 급격히 저하된다. 토크가 큰 모터임을 감안하고 모터에 무리를 주지 않으려면 12V에서는 300~400배속이 한계가 될 것 같다.
주기 오차에 대한 조건
- 회전 정밀도 : 출력부가 1회전 했을 때 입력부와 출력부(감속비로 나눈 후)의 각도 차이를 말한다. 감속비가 높을수록 톱니가 세밀하므로 일반적으로 정밀도가 높다. CSF 17-100의 경우 1.5arcmin 이내. 여러 종류의 감속기 중에서 매우 작은 편이다.
- 하모닉 기어의 주요한 주기 오차도 여기에서 나타날 것이다. 웨이브 제너레이터가 1회전 하는 동안 100개의 톱니를 지나고 나면 출력부가 1칸 만큼 회전한다. 위에서 말한 감속비 조건이라면 그 주기는 861.6초(=14분 21.6초)가 된다.
- 이 시간은 PEC(주기오차보정)를 적용할 때 1회 학습에 필요한 최소 시간이다. 14.4분... 좀 지루하지만 그래도 참을만한 시간이다. 만약 감속비 50:1인 하모닉 기어를 쓴다면 이 시간은 2배가 된다. 너무 길다. 참고로 Losmandy G11의 경우 웜 휠 감속비가 360:1이므로 웜 기어 주기는 4분이다.
- 적경축에 쓸 하모닉 기어는 감속비가 클수록 유리하다.
- 주기 오차의 크기는 얼마일까? 그건 직접 해봐야 한다. 중고 하모닉 기어를 쓰기 때문에 더욱 걱정되는 부분이다.
- 여기에 중간 감속기의 주기 오차가 더해지겠지. 주기가 1분 26초인 것.
백래시 조건
- 백래시는 오토가이드와 GOTO의 적이다.
- 하모닉 드라이브 기어는 백래시가 전혀 없다(고 하지만 매우 작다). 플렉서블 스파인 기어가 탄성에 의해 양쪽으로 밀착되어 있고 그 상태에서 10개 이상의 이(teeth)가 동시에 걸려있기 때문에 전후 회전 방향으로 톱니의 유격이 없다.
- 그렇다고 적도의 전체에 백래시가 없을 수는 없다. 중간 감속 모터도 백래시가 있다.
- 백래시를 전혀 안생기도록 하려면?
(1) 2중 하모닉 드라이브 기어 + 모터 -> 비용, 무게, 부피, 감속비 문제
(2) 하모닉 기어 + 하모닉 감속 모터 -> 비용. 감속비 문제
(3) 벨트 감속 -> 백래시에 효율적이고 감속비도 다양. 동축 설계가 아님. 주기 오차 추가?
(4) 고정밀 유성기어(high precision planetary gear)
-> 동축 설계. 감속비 다양. 백래시 작은 것(3arcmin)은 고가이고 부피 큼.
(5) 볼감속기(ball reducer gear) : Kamoseiko(카모정밀) 특허
-> 백래쉬 없음. 부피 있음. 연결부 사양 맞는 것이 중고에서 귀함. 비쌈.
(BRA35-10G-Φ5 제품을 고려했으나(아래 그림), 구하기 어렵고 비싸고...)
 - 결국 현실적으로 돌아와서 중국제 일반 유성기어 모터를 샀다.
- 결국 현실적으로 돌아와서 중국제 일반 유성기어 모터를 샀다.
중간 감속기의 백래시 영향 예측
(1) 적경축 백래시
1배속 항성시 추적에 0.5배속 오토가이드를 한다고 가정해보자. 별보다 뒤쳐지면 1.5배속으로 따라가고 별보다 빨라지면 0.5배속으로 늦추어진다. 어차피 오토가이드 과정에서 적경축 모터가 역회전을 할 일은 없다. 백래시를 염려할 필요가 없다.
고속 탐색 후 저속 도입, 구도 잡기 과정에서는 백래시가 적은 것이 좋다. 특히 역방향으로 대상을 도입한 경우에는 정방향으로 다시 회전해서 추적이 시작되기 전에 이미 대상이 흘러버려 구도 잡는 일이 나빠진다. 특히 장초점에서는 구도를 잡는 과정에서 대상물이 흘러버리면 정신 건강에 해롭다. 아래와 같이 중간 감속 모터의 백래시 보상 시간을 계산해보았다.
* 해당 유성 감속모터의 출력부 백래시는 최대 15'
* 감속모터 출력 속도는(감속비 100:1 짜리 하모닉 기어에 연결하므로) = 25'/s
* 역회전으로 15'을 헛도는 시간은 0.6초. 그 다음부터는 기어가 만난다.
이 정도면 대상을 도입하고 기다리는 시간을 걱정할 필요가 없다. 웜기어와 웜휠의 경우라면 오래 기다려야 한다. 지금 쓰고 있는 로즈만디 G11 적도의의 백래시를 측정해 본 적은 없다. 적게 잡아2'(arcmin)이라고 해보자. 웜휠의 잇수가 360개이므로 톱니 1개가 1°, 고로 4분이 소요된다. 2'을 되돌아가려면 8초가 걸린다. 결론적으로 웜-웜휠 시스템에서는 최종 감속 단계에서 백래시가 존재하지만 하모닉 드라이브 시스템에서는 중간 감속기에서 백래시가 존재하므로 백래시를 보상하는 대기 시간이 짧고 대응이 빠르다.
(2) 적위축 백래시
가이드에 직접적인 영향을 준다. 가급적이면 0으로 만들어주는 것이 좋다. 그래서 일부러 기어 감속기 대신 벨트 감속기를 쓰는 분도 있다.
그런데 굳이 그렇게 설계할 필요가 있을까? 하모닉 드라이브 적도의는 밸런스를 깬 상태로 써도 하등 지장이 없다. 적위축의 경우 밸런스 안맞추는게 낫다. 적위축 밸런스가 완벽하다면 적위축 가이드 방향이 바뀔 때마다 0.6초씩을 낭비하게 된다. 시시각각 변하는 상황에서 매번 뒤늦게 반응하는 꼴이 된다.
광학부(OTA) 균형에 신경쓰지 않고 사용하는 것이 편의성을 위해서나 가이드 품질을 위해서나 유리할 것이다. 적위축 백래시 걱정? 글쎄... 거의 안해도 된다. 그렇게 기대한다.
전기전자 파트 사양 조건
- 감속 스테핑 모터
2상(2 phase)으로 정한 이유는 적도의 제어용 모터 드라이버(AstroEQ)가 이것만 지원하기 때문이다. 같은 이유로, 상별 정격 전류가 1.5A 이하인지 확인했다. 역회전이 가능해야 하므로 바이폴라 결선을 해야한다. 모터 스펙이 상세하지 않아서 입력 전압은 알 수가 없다. 보통 NEMEA 17 스테핑 모터 컨트롤의 인입 전압은 12~36V을 받는다. AstroEQ의 인입 전력이 12~24V로 되어 있고 모터 제어 전압을 조정할 수 있으니까 무리 없을 듯.
기계 파트 사양 조건
- 무게 : 하모닉 드라이브 기어 CSF-2UH에서 17-100은 680g, 14-100은 520g으로 160g 더 가볍다. 이 정도 무게와 약간의 부피를 아끼려고 토크가 낮은 사양으로 가기는 아깝다. 17-100 사양에서 LW 버전이 가볍지만 중고로 구하기 어려워서 패스
- 입력부(웨이브 제너레이터 결속 구멍 지름) : 17 사이즈 기어에서 결속부 지름은 Φ8, 14 사이즈는 Φ6이다. 감속 모터의 출력부가 8mm이니까 그냥 17 사이즈로 간다. 적경 적위 모두 모터 조립은 직결 방식으로 하고 세트 스크루로 고정한다. 안그러면 커플러 써야 하는데... 그건 어댑터도 두꺼워지고 동력 전달에도 안좋고.
- 하모닉 드라이브 기어는 2UH가 컴팩트하다. 출력부 베어링이 포함된 유닛이라서 입력부 어댑터만 맞춰주면 바로 사용이 가능하다. 출력부가 플랜지 타입이라서 군더더기 공사도 없고.
- 감속 스테핑 모터
Nema 17 사이즈(정사각 한변 42mm, 대각선 59mm), 길이는 감속부 포함 69mm다. 좀더 긴 모터도 있는데 이 정도만으로도 충분한 토크가 나오기 때문에 사이즈가 작은 쪽으로 선택했다. 하모닉 기어의 결합부와 간섭 없이 쏙 들어가 앉을 크기이다. [아래 도면]


2018.05.10
감속비에 대한 재고
하모닉 기어 구하기가 힘들다. 17-100이 드물고 비싸다. 17-50이 조금 더 싸게 거래되는 것 같은데... 바꿔보면 어떨까? 적경 적위 중 한 축만 조합을 바꿔볼까?
적경축 : 감속모터 10:1, 하모닉 감속기 100:1
적위축 : 감속모터 20:1, 하모닉 감속기 50:1
- 총감속비와 모터 제어는 큰 차이가 없을것 같다. AstroEQ를 쓸 경우에 총감속비의 차가 크지 않으므로 양축 GOTO 속도를 맞추는 데에도 문제가 없을 것 같다.
- 하모닉 감속기 17-50 제품은 17-100 제품보다 토크가 작다. 약 65% 정도. 토크가 작은 것이 적위축을 담당해야 한다.
- 감속모터도 달라져야 한다. 문제는 20:1 감속모터의 백래시가 더 크다는 것. 10:1 감속모터는 <15arcmin인 반면 20:1 감속모터는 <25arcmin으로 좀 크다.
- 기존에 10:1 감속모터를 2개 구입해 둔 상황이므로 20:1 감속모터를 추가 구입하는 것은 부담스럽다.
- (2019.11.23 추가) 정지 토크가 중요하다. 무전원 상태에서 망원경이 추락하지 않아야 한다. 감속비가 클수록 정지 토크가 커서 유리하다.
2018.05.15
첫 번째 하모닉 기어 도착. 생각보다 작다.

2018.05.21
두 번째 하모닉 기어 도착.

두 번째 것은 약~간 사각사각 거리는 느낌이 있는데.... 플렉서블 기어의 틈새 쪽은 청소를 할 수가 없다. 분해도 안되고 기름으로 닦아내더라도 구리스를 넣을 수가 없다. ㅎㅎ
웨이브 제너레이터 쪽은 분리해서 완전히 닦아내고 새 구리스를 바를 수 있다. 이 작업은 최종 조립 직전에 해야지.
2018.05.23
모터와 기어를 연결하기 위한 어댑터 제작
일단 3D 프린터로 뽑아보고 이상 없으면 알루미늄으로 제작 예정.

하모닉 드라이브 기어는 순서를 지켜서 조립해야 한다.
부품을 설계할 때부터 연결 순서를 고려해야 한다.
 2018.05.24
2018.05.24
3D프린터로 출력한 어댑터로 연결해 봄.
일단 굿. 그런데 웨이브 제너레이터를 모터 샤프트에 고정하는 세트 스크루를 조립하는 일이 까다롭다. 어쨌든 시작.

2018.10.23
모터 선정에 대해 좀 다른 생각이 들었다.
III부 제어 파트 게시물 참조
2019.11.05
전체적으로 무게가 7kg를 넘을 것 같다. 중량을 줄여야 한다.
적위축이 굳이 클 필요가 없어보인다.
적위축 파동기어의 크기와 형태를 CSD-14-100으로 바꾸면 어떨까 하는 생각을 하고 있다.
파동기어 지름이 70mm이고 두께가 22mm로 얇다.
2019. 11. 23
하모닉 드라이브의 제품 중에서 SHF, SHG 형이 얇고 강하다. 특히 SHG-2SO 타입이 두께, 토크, 모멘트 면에서 우수하다. 조금 무거운 것이 흠이지만. 다음에 파동기어 적도의를 만들 때는 얇은 형번으로 만들어 볼 생각이 있다.
적위축 파동기어는 CSF-14-100으로 변경해서 구입했다. 웨이브 제너레이터의 입력 축 구멍도 8mm로 맞추어 구했다.

- 14 사이즈 기어 유닛은 가볍고 작아서 좋지만 토크가 작아 탑재중량이 작아진다.
- 20, 25, 32와 같이 큰 사이즈는 무게, 부피, 가격이 부담된다.
- 결론 : CSF-17-100-2UH (17사이즈, 감속비 100:1, 플랜지와 베어링을 포함한 유닛)
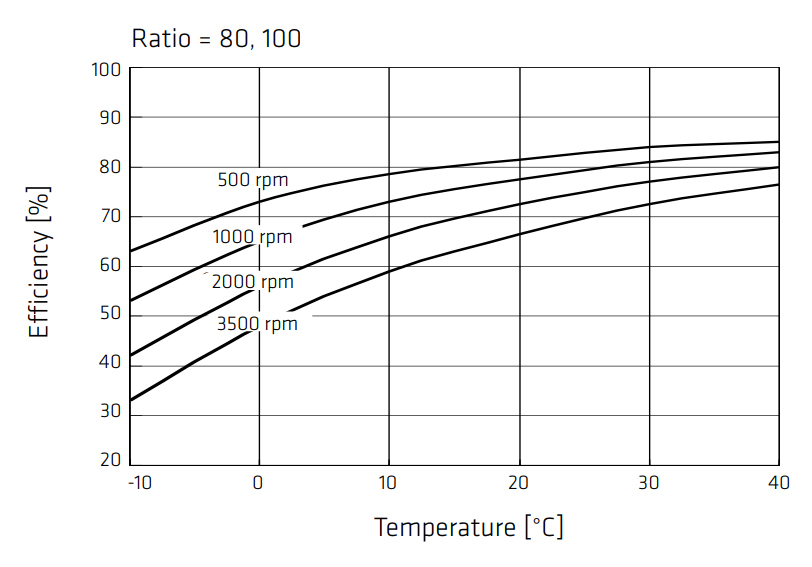 |
| CSF-17-100-2UH torque transmission efficiency |
- 감속 스테핑 모터
중간 감속모터는 중국산 유성기어 스테퍼 모터를 선택했다. 감속비는 10:1.
최종 하모닉 기어의 감속비가 100:1니까 하모닉 기어의 입력부(중간 감속모터의 출력부) 토크는 0.39Nm이면 된다. 동력 전달율이 80%를 고려하면 0.4875Nm면 된다. 중간 감속 모터의 홀딩 토크가 3.0Nm라고 한다. 충분하겠지? 스테핑 모터가 저속 운전할 때의 최대 토크는 홀딩 토크의 약 70~80% 정도인 것 같다.(아래 그래프)

만약 모터의 출력 토크가 0.5Nm로 요구되는데 16마이크로스테핑을 한다면 모터의 최대 토크가 5Nm로 요구된다.
스테퍼 모터에 공급할 수 있는 최대 전압은 인덕턴스(mH 값)의 제곱근의 32배이다. 이번에 구입한 모터의 인덕턴스가 4.1mH이므로 최대 공급 전압은 64.8V이다.
물론 이 값이 실용적이지는 않다. 만약 이런 상태로 1.2A를 걸면 78와트를 쓰기 때문에 발열이 많고 드라이버에도 무리가 간다.
///
감속비 계산
하모닉 드라이브에서 100:1, 감속모터에서 10:1. 적경 적위축 모두 동일한 사양으로 최종 감속비는 1000:1이다.
=== 항성 추적시의 속도를 계산해 본다.
* 항성시 각속도 = 하모닉 기어 출력 각속도 = 15"/s
* 중간 감속 모터 출력 속도(x100) = 1500"/s = 25'/s
* 스테퍼 모터의 속도(x10) = 15000"/s = 4.167°/s
스테퍼 모터의 회전 주기 = 360°/(4.167°/s) = 86.16s
스테퍼 모터의 초당 스텝수 = 200/86.16=2.32step/s
* AstroEQ를 쓸 경우 저속에서 32 마이크로스텝을 적용한다면,
스테퍼 모터의 초당 펄스수 = 32*2.32 = 74pps
이 정도면 부드럽게 돌아갈 것 같다.
=== 고속 탐색 400배를 생각해본다.
AstroEQ 제어기는 고속 탐색에서 4 마이크로스텝을 사용한다고 한다.
* 스테퍼 모터의 분당 회전수 = 400*(4.167°/s)*(60s/min)/360° = 277.7rpm (적정 범위)
스테퍼 모터의 초당 펄스수 = 400*2.32*4 = 3712pps (적정 범위)
이 모터는 스펙이 자세하지 않다. 회전수-토크 그래프가 없다. 그러나 일반적인 스테핑 모터의 사양을 보니 24V 구동시 300rpm까지는 토크 저하가 없다. 12V 구동시 150rpm을 넘어서면 토크가 급격히 저하된다. 토크가 큰 모터임을 감안하고 모터에 무리를 주지 않으려면 12V에서는 300~400배속이 한계가 될 것 같다.
주기 오차에 대한 조건
- 회전 정밀도 : 출력부가 1회전 했을 때 입력부와 출력부(감속비로 나눈 후)의 각도 차이를 말한다. 감속비가 높을수록 톱니가 세밀하므로 일반적으로 정밀도가 높다. CSF 17-100의 경우 1.5arcmin 이내. 여러 종류의 감속기 중에서 매우 작은 편이다.
- 하모닉 기어의 주요한 주기 오차도 여기에서 나타날 것이다. 웨이브 제너레이터가 1회전 하는 동안 100개의 톱니를 지나고 나면 출력부가 1칸 만큼 회전한다. 위에서 말한 감속비 조건이라면 그 주기는 861.6초(=14분 21.6초)가 된다.
- 이 시간은 PEC(주기오차보정)를 적용할 때 1회 학습에 필요한 최소 시간이다. 14.4분... 좀 지루하지만 그래도 참을만한 시간이다. 만약 감속비 50:1인 하모닉 기어를 쓴다면 이 시간은 2배가 된다. 너무 길다. 참고로 Losmandy G11의 경우 웜 휠 감속비가 360:1이므로 웜 기어 주기는 4분이다.
- 적경축에 쓸 하모닉 기어는 감속비가 클수록 유리하다.
- 주기 오차의 크기는 얼마일까? 그건 직접 해봐야 한다. 중고 하모닉 기어를 쓰기 때문에 더욱 걱정되는 부분이다.
- 여기에 중간 감속기의 주기 오차가 더해지겠지. 주기가 1분 26초인 것.
백래시 조건
- 백래시는 오토가이드와 GOTO의 적이다.
- 하모닉 드라이브 기어는 백래시가 전혀 없다(고 하지만 매우 작다). 플렉서블 스파인 기어가 탄성에 의해 양쪽으로 밀착되어 있고 그 상태에서 10개 이상의 이(teeth)가 동시에 걸려있기 때문에 전후 회전 방향으로 톱니의 유격이 없다.
- 그렇다고 적도의 전체에 백래시가 없을 수는 없다. 중간 감속 모터도 백래시가 있다.
- 백래시를 전혀 안생기도록 하려면?
(1) 2중 하모닉 드라이브 기어 + 모터 -> 비용, 무게, 부피, 감속비 문제
(2) 하모닉 기어 + 하모닉 감속 모터 -> 비용. 감속비 문제
(3) 벨트 감속 -> 백래시에 효율적이고 감속비도 다양. 동축 설계가 아님. 주기 오차 추가?
(4) 고정밀 유성기어(high precision planetary gear)
-> 동축 설계. 감속비 다양. 백래시 작은 것(3arcmin)은 고가이고 부피 큼.
(5) 볼감속기(ball reducer gear) : Kamoseiko(카모정밀) 특허
-> 백래쉬 없음. 부피 있음. 연결부 사양 맞는 것이 중고에서 귀함. 비쌈.
(BRA35-10G-Φ5 제품을 고려했으나(아래 그림), 구하기 어렵고 비싸고...)

중간 감속기의 백래시 영향 예측
(1) 적경축 백래시
1배속 항성시 추적에 0.5배속 오토가이드를 한다고 가정해보자. 별보다 뒤쳐지면 1.5배속으로 따라가고 별보다 빨라지면 0.5배속으로 늦추어진다. 어차피 오토가이드 과정에서 적경축 모터가 역회전을 할 일은 없다. 백래시를 염려할 필요가 없다.
고속 탐색 후 저속 도입, 구도 잡기 과정에서는 백래시가 적은 것이 좋다. 특히 역방향으로 대상을 도입한 경우에는 정방향으로 다시 회전해서 추적이 시작되기 전에 이미 대상이 흘러버려 구도 잡는 일이 나빠진다. 특히 장초점에서는 구도를 잡는 과정에서 대상물이 흘러버리면 정신 건강에 해롭다. 아래와 같이 중간 감속 모터의 백래시 보상 시간을 계산해보았다.
* 해당 유성 감속모터의 출력부 백래시는 최대 15'
* 감속모터 출력 속도는(감속비 100:1 짜리 하모닉 기어에 연결하므로) = 25'/s
* 역회전으로 15'을 헛도는 시간은 0.6초. 그 다음부터는 기어가 만난다.
이 정도면 대상을 도입하고 기다리는 시간을 걱정할 필요가 없다. 웜기어와 웜휠의 경우라면 오래 기다려야 한다. 지금 쓰고 있는 로즈만디 G11 적도의의 백래시를 측정해 본 적은 없다. 적게 잡아2'(arcmin)이라고 해보자. 웜휠의 잇수가 360개이므로 톱니 1개가 1°, 고로 4분이 소요된다. 2'을 되돌아가려면 8초가 걸린다. 결론적으로 웜-웜휠 시스템에서는 최종 감속 단계에서 백래시가 존재하지만 하모닉 드라이브 시스템에서는 중간 감속기에서 백래시가 존재하므로 백래시를 보상하는 대기 시간이 짧고 대응이 빠르다.
(2) 적위축 백래시
가이드에 직접적인 영향을 준다. 가급적이면 0으로 만들어주는 것이 좋다. 그래서 일부러 기어 감속기 대신 벨트 감속기를 쓰는 분도 있다.
그런데 굳이 그렇게 설계할 필요가 있을까? 하모닉 드라이브 적도의는 밸런스를 깬 상태로 써도 하등 지장이 없다. 적위축의 경우 밸런스 안맞추는게 낫다. 적위축 밸런스가 완벽하다면 적위축 가이드 방향이 바뀔 때마다 0.6초씩을 낭비하게 된다. 시시각각 변하는 상황에서 매번 뒤늦게 반응하는 꼴이 된다.
광학부(OTA) 균형에 신경쓰지 않고 사용하는 것이 편의성을 위해서나 가이드 품질을 위해서나 유리할 것이다. 적위축 백래시 걱정? 글쎄... 거의 안해도 된다. 그렇게 기대한다.
전기전자 파트 사양 조건
- 감속 스테핑 모터
2상(2 phase)으로 정한 이유는 적도의 제어용 모터 드라이버(AstroEQ)가 이것만 지원하기 때문이다. 같은 이유로, 상별 정격 전류가 1.5A 이하인지 확인했다. 역회전이 가능해야 하므로 바이폴라 결선을 해야한다. 모터 스펙이 상세하지 않아서 입력 전압은 알 수가 없다. 보통 NEMEA 17 스테핑 모터 컨트롤의 인입 전압은 12~36V을 받는다. AstroEQ의 인입 전력이 12~24V로 되어 있고 모터 제어 전압을 조정할 수 있으니까 무리 없을 듯.
기계 파트 사양 조건
- 무게 : 하모닉 드라이브 기어 CSF-2UH에서 17-100은 680g, 14-100은 520g으로 160g 더 가볍다. 이 정도 무게와 약간의 부피를 아끼려고 토크가 낮은 사양으로 가기는 아깝다. 17-100 사양에서 LW 버전이 가볍지만 중고로 구하기 어려워서 패스
- 입력부(웨이브 제너레이터 결속 구멍 지름) : 17 사이즈 기어에서 결속부 지름은 Φ8, 14 사이즈는 Φ6이다. 감속 모터의 출력부가 8mm이니까 그냥 17 사이즈로 간다. 적경 적위 모두 모터 조립은 직결 방식으로 하고 세트 스크루로 고정한다. 안그러면 커플러 써야 하는데... 그건 어댑터도 두꺼워지고 동력 전달에도 안좋고.
- 하모닉 드라이브 기어는 2UH가 컴팩트하다. 출력부 베어링이 포함된 유닛이라서 입력부 어댑터만 맞춰주면 바로 사용이 가능하다. 출력부가 플랜지 타입이라서 군더더기 공사도 없고.
- 감속 스테핑 모터
Nema 17 사이즈(정사각 한변 42mm, 대각선 59mm), 길이는 감속부 포함 69mm다. 좀더 긴 모터도 있는데 이 정도만으로도 충분한 토크가 나오기 때문에 사이즈가 작은 쪽으로 선택했다. 하모닉 기어의 결합부와 간섭 없이 쏙 들어가 앉을 크기이다. [아래 도면]
연결하면 이렇게 될 것으로 예상된다.


2018.05.10
감속비에 대한 재고
하모닉 기어 구하기가 힘들다. 17-100이 드물고 비싸다. 17-50이 조금 더 싸게 거래되는 것 같은데... 바꿔보면 어떨까? 적경 적위 중 한 축만 조합을 바꿔볼까?
적경축 : 감속모터 10:1, 하모닉 감속기 100:1
적위축 : 감속모터 20:1, 하모닉 감속기 50:1
- 하모닉 감속기 17-50 제품은 17-100 제품보다 토크가 작다. 약 65% 정도. 토크가 작은 것이 적위축을 담당해야 한다.
- 감속모터도 달라져야 한다. 문제는 20:1 감속모터의 백래시가 더 크다는 것. 10:1 감속모터는 <15arcmin인 반면 20:1 감속모터는 <25arcmin으로 좀 크다.
- 기존에 10:1 감속모터를 2개 구입해 둔 상황이므로 20:1 감속모터를 추가 구입하는 것은 부담스럽다.
- (2019.11.23 추가) 정지 토크가 중요하다. 무전원 상태에서 망원경이 추락하지 않아야 한다. 감속비가 클수록 정지 토크가 커서 유리하다.
2018.05.15
첫 번째 하모닉 기어 도착. 생각보다 작다.

2018.05.21
두 번째 하모닉 기어 도착.

두 번째 것은 약~간 사각사각 거리는 느낌이 있는데.... 플렉서블 기어의 틈새 쪽은 청소를 할 수가 없다. 분해도 안되고 기름으로 닦아내더라도 구리스를 넣을 수가 없다. ㅎㅎ
웨이브 제너레이터 쪽은 분리해서 완전히 닦아내고 새 구리스를 바를 수 있다. 이 작업은 최종 조립 직전에 해야지.
2018.05.23
모터와 기어를 연결하기 위한 어댑터 제작
일단 3D 프린터로 뽑아보고 이상 없으면 알루미늄으로 제작 예정.

하모닉 드라이브 기어는 순서를 지켜서 조립해야 한다.
부품을 설계할 때부터 연결 순서를 고려해야 한다.

3D프린터로 출력한 어댑터로 연결해 봄.
일단 굿. 그런데 웨이브 제너레이터를 모터 샤프트에 고정하는 세트 스크루를 조립하는 일이 까다롭다. 어쨌든 시작.

2018.10.23
모터 선정에 대해 좀 다른 생각이 들었다.
III부 제어 파트 게시물 참조
2019.11.05
전체적으로 무게가 7kg를 넘을 것 같다. 중량을 줄여야 한다.
적위축이 굳이 클 필요가 없어보인다.
적위축 파동기어의 크기와 형태를 CSD-14-100으로 바꾸면 어떨까 하는 생각을 하고 있다.
파동기어 지름이 70mm이고 두께가 22mm로 얇다.
2019. 11. 23
하모닉 드라이브의 제품 중에서 SHF, SHG 형이 얇고 강하다. 특히 SHG-2SO 타입이 두께, 토크, 모멘트 면에서 우수하다. 조금 무거운 것이 흠이지만. 다음에 파동기어 적도의를 만들 때는 얇은 형번으로 만들어 볼 생각이 있다.
적위축 파동기어는 CSF-14-100으로 변경해서 구입했다. 웨이브 제너레이터의 입력 축 구멍도 8mm로 맞추어 구했다.

댓글 없음:
댓글 쓰기